
Slowly-slowly autonomous vehicles have entered the vehicle industry with increasing user of it year by year. It is made possible only by combining the power of IoT and technologies such as machine learning, artificial intelligence, and local fast computing. In simple words, vehicles are equipped with several advanced sensors that continually provide real-time fetched data to machine learning systems installed in vehicles as well as to local computing servers to process those data. Based on that data, the system determines the decision and controls the vehicle. These processing units are ECUs (Electronic Control Unit) and machine learning software. These machine learning models continuously process these data about the surroundings and objects in it. So, let’s explore and understand the top 10 algorithms used for autonomous vehicles.
1. Route Planning And Control Algorithms
Route planning and control algorithms include traditional algorithms such as heuristic searches which are generally used in these tasks. Algorithms like Dijkstra’s algorithm and Bellman-Ford are among the ones that learn data structure and algorithms. These algorithms use data received from continuous localization of vehicle position using GPS sensors as well as SLAM (simultaneous localization and mapping techniques).
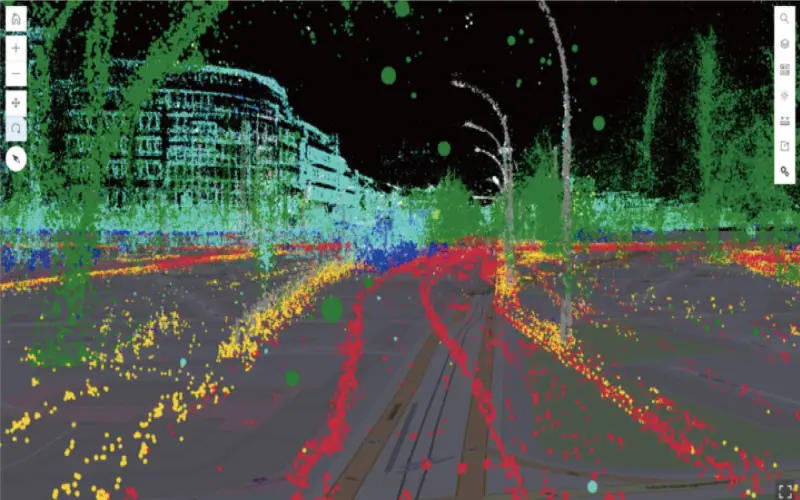
2. Simultaneous Localization And mapping (SLAM)
Simultaneous localization and mapping technique (SLAM) is a technique used for the localization of vehicles when GPS is not available. SLAM creates a map of the surrounding environment with every movement and at the same time, it finds the state and position of the vehicle. Map consists of landmarks, obstacles, and road signs to represent the 3D environments. SLAM is used in various applications where the map is not available and has to be created. It consists of various special algorithms and advanced sensors which are used to create a 3D map.
3. Object Detection Algorithms
The object detection algorithm is one of the most used algorithms in machine learning and artificial intelligence. It is trained on tons and tons of image data which is then used to create a model for detection of any particular object or several objects. In autonomous vehicles, these algorithms are used by using data from sensors and then processing it on these object detection models, which then detect the object to move the information to the next processor to decide the direction, movement, and speed of the vehicle.

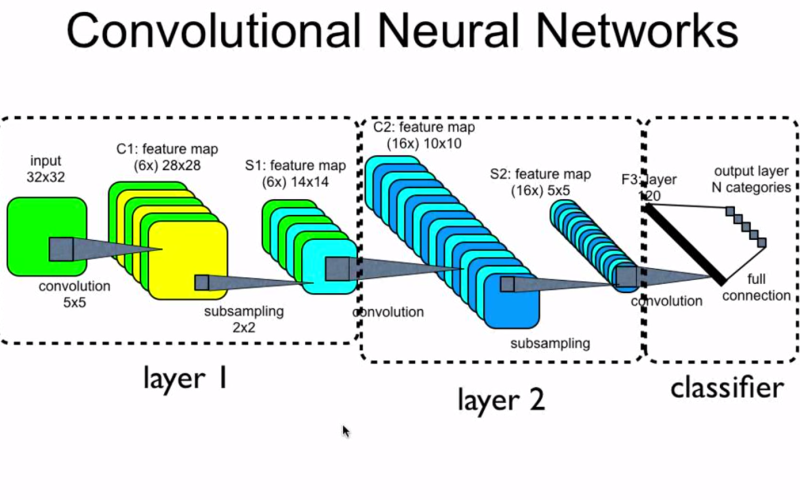
4. Convolutional Neural Networks (CNN)
A convolutional neural network is a type of artificial network that is used for various types of applications including autonomous vehicles. A few types of CNN are R-CNN (Region convolutional neural network), Fast R-CNN, and YOLO (You look only once) algorithms. RCNN selects one region that has a higher chance of finding objects and then analyses all the regions. This makes RCNN a slower model and that brings fast RCNN and YOLO into work. YOLO checks all the regions together and process object using only one convolutional neutral layer making it fast.
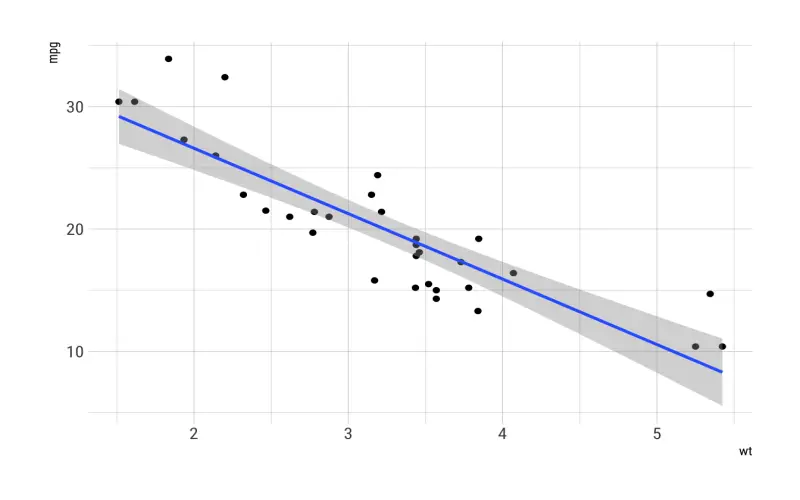
5. Regression Algorithms
Advanced driver assistance system (ADAS), a radar or camera plays an important role in localization and actuation and is used to develop the image-based model for feature selection and prediction of object. Regression algorithms that are used in self-driving cars are Bayesian regression, neural network regression, and decision forest regression. These algorithms are used on ADAS images and data.
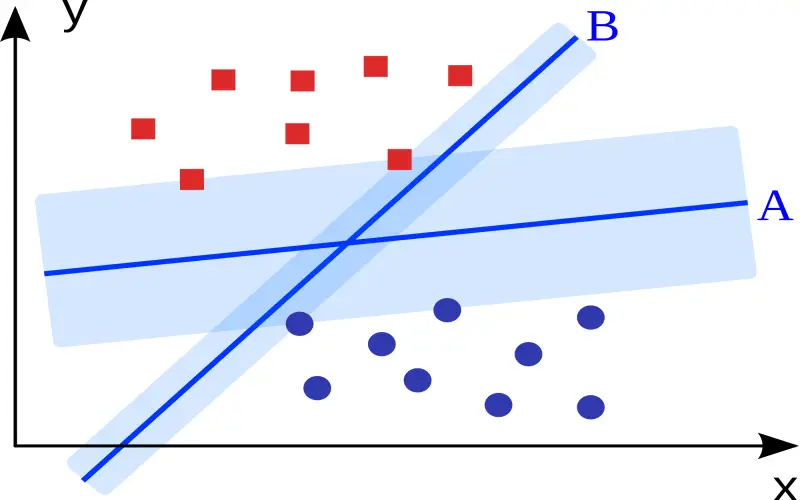
6. Pattern Recognition Algorithms
Pattern recognition algorithms are used to understand and determine unusual (not related) data points. Recognition of patterns in data is a very important step as it helps in reducing data size and unrelated points. These algorithms detect object edge and line segments from image data which later helps in reducing data size. One of the best algorithms for this is SVM (Support vector machine) algorithms with HOG (Histograms of oriented gradients) and PCA (principal components analysis).
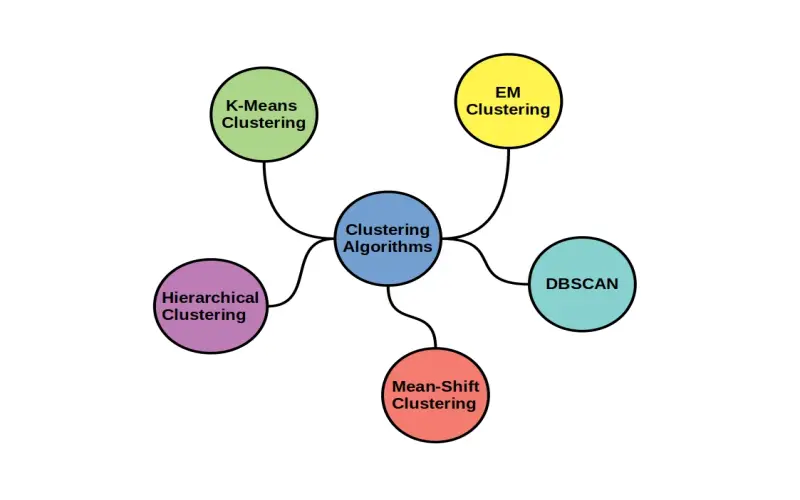
7. Clustering Algorithms
The image received by ADAS (Advanced Driver Assistance System) might not be clear or of very little resolution and that can greatly impact the decision-making of system and algorithms. It might also be possible that the classification model has classified the object and in that case, cluster algorithms can be used which are great at discovering structures from data points. Clustering algorithms are made using centroid-based and hierarchical modeling approaches. All clustering algorithms use inherent structures to categorize the data into groups having similar features.
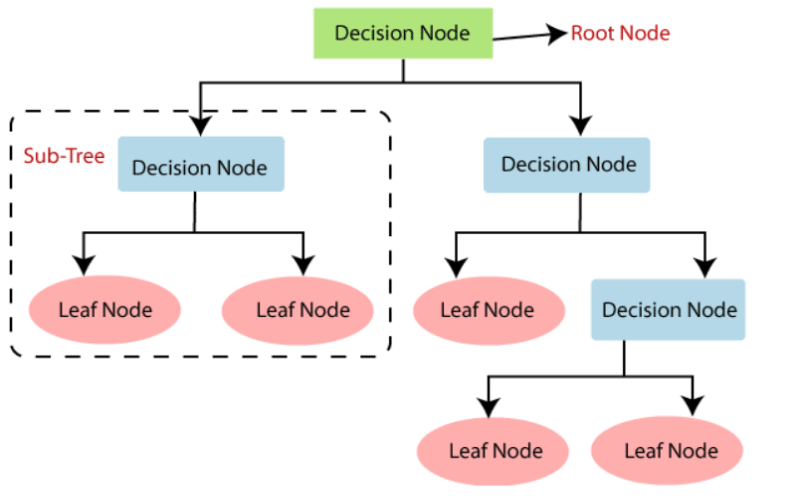
8. Decision Matrix Algorithms
The most used decision matrix algorithms are gradient boosting (GDM) and Ada boosting. Decision matrix algorithms are used for deciding as the name suggests. This algorithm is used to identify, analyze, and rate the performance of relationships established between the sets of input data. These algorithms are used to determine the movement of self-driving cars. Actions like acceleration, brake, and turns are determined by answers which are made by the accuracy of these classification, recognition, and prediction algorithms of objects.
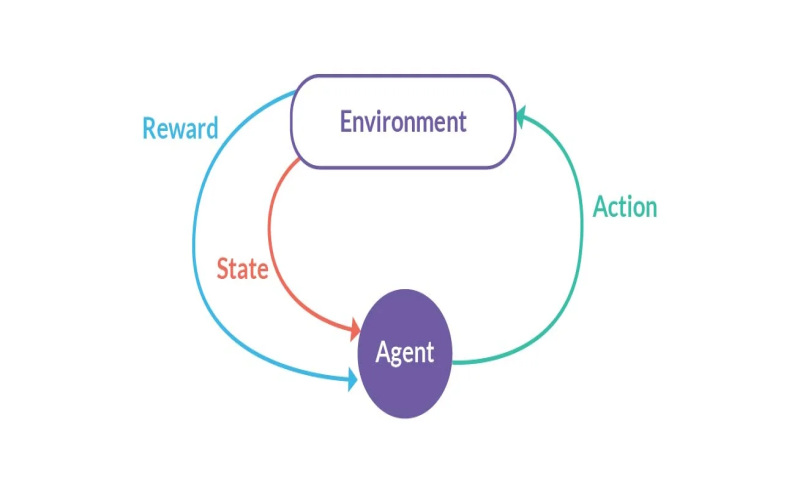
9. Reinforcement Learning
Reinforcement learning is a popular machine learning algorithm that is known for learning on its own. That means that the reinforcement learning algorithm is fed with input data without any external classification and categorisation of data and the algorithm itself understands the relationship between data and finds out the categories. In the context of autonomous learning these algorithms make decisions by repeating the actions in an environment and because of repeating they become better and better. Companies like Tesla, Waymo, and GM use algorithms like this.
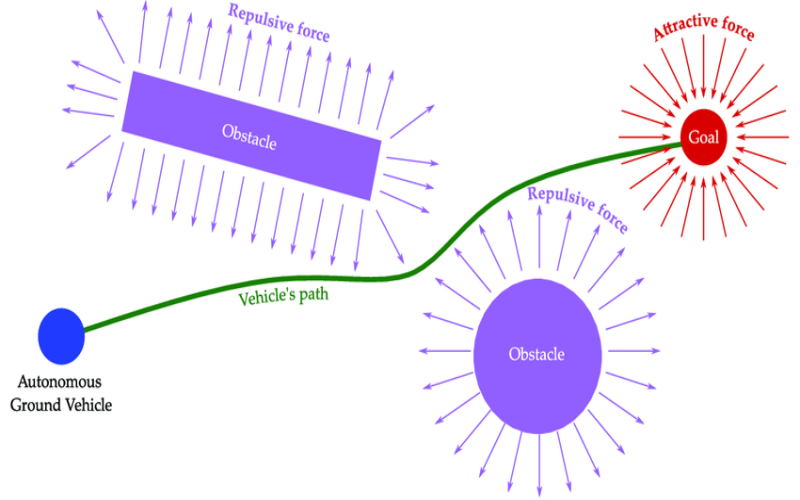
10. Artificial Potential Field (APF)
Lastly, we have an artificial potential field which is a traditional algorithm for path planning and finding. The basic concept of APF is to create a virtual force field of the surrounding environment, this connects the mass points from several other autonomous vehicles and visualizes the autonomous vehicles as mass points. Making a virtual map of roads and vehicles around it. Using this movement of a mass point in the direction of the force a smooth and collision-free path is constructed which is the path of the vehicle.














{kind=link}