
The Robotics Industry has grown a lot in recent times. You must have seen a few robots performing some cool stunts like summersaults, wellie, and a lot more which is not so common for average humans. Other than that there are human robots that resemble the human body structure and non-humanoid robots that are of different features and body parts. Humanoid robots have been already seen in a few expensive hotels and resorts for performing general guidance and serving tasks. And non-humanoid robots are used in several factories for heavy lifting, moving, and several other tasks. But have you ever thought about how these complex robots operate on their own? Well, they have been coding using certain types of frameworks to do so. So in this article, we will understand and learn about the top 10 frameworks that help us develop robotic software. This framework ranges from general-purpose robot development to advanced development frameworks.
1. ROS
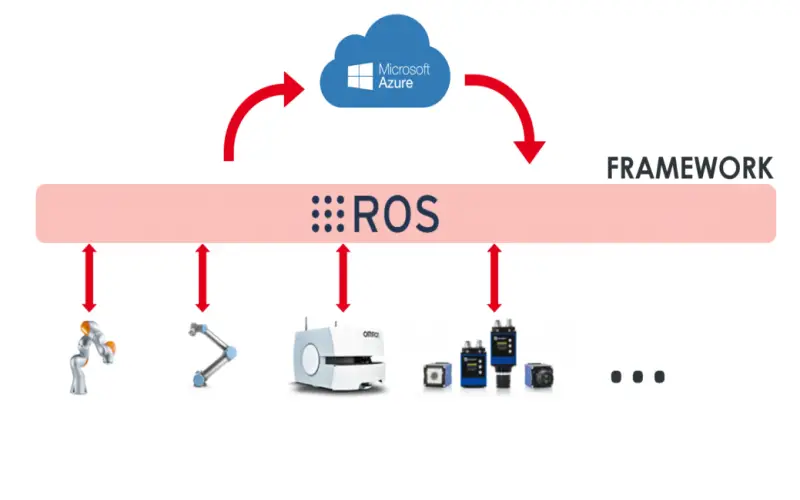
ROS is an open-source robotics software framework. It provides libraries and tools for developing robot applications. ROS has packages for hardware abstraction, device drivers, visualizers, message passing, package management, and more. It supports both C++ and Python for development. ROS is modular with many community-contributed packages. It has become hugely popular in research and industry. Many companies, universities, and hobbyists use ROS for developing robot software. The main benefits are cross-platform portability, powerful simulator tools like Gazebo, and a large ecosystem of packages and support.
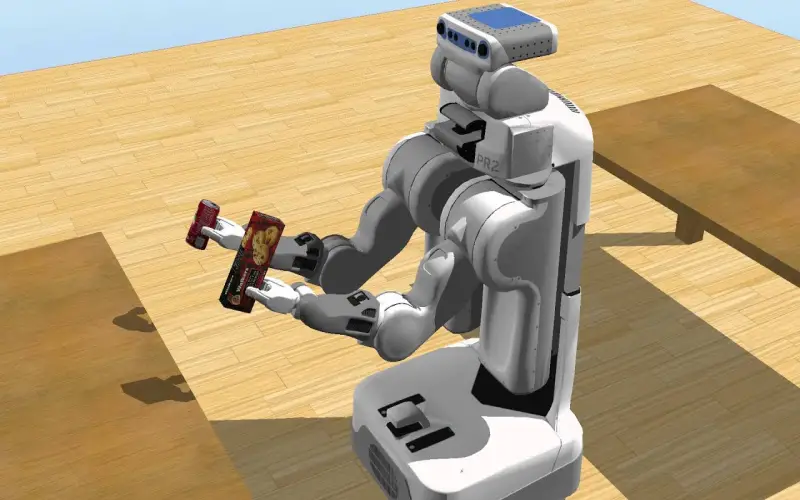
2. Gazebo
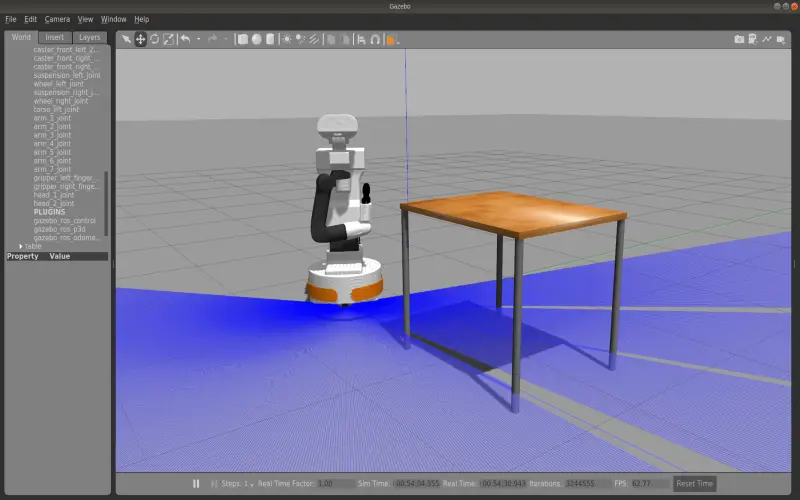
Gazebo is an open-source 3D robotics simulator integrated with ROS. It provides high-fidelity physics simulation with realistic environmental effects. Gazebo can accurately model sensors like cameras, lidar, and IMU. It has a robust physics engine for modeling rigid and articulated bodies. Gazebo lets you prototype and test robot designs and environments before using physical hardware. This reduces development time and costs. Gazebo models can integrate with ROS nodes for testing full robot systems. Many robots have Gazebo models contributed by the community. The gazebo is a critical tool for robot development in ROS.
3. RobotC
RobotC is a C-based programming language optimized for robotics. It is designed for educational and hobby robots like VEX, LEGO Mindstorms, and robotics competitions. RobotC provides an easy-to-learn programming interface for beginners. It supports many hardware platforms through cross-compiler support. RobotC includes debugging tools and drivers for motors, sensors, and other devices. While less advanced than frameworks like ROS, RobotC is a great starting point for learning and simple projects.
4. Microsoft Robotics Developer Studio
Microsoft Robotics Developer Studio (MRDS) was a Windows-based robotics framework launched in 2006. It provided a visual programming interface for hobbyist and academic robotics. MRDS had a physics simulator for testing before deploying to real hardware. Microsoft discontinued active development in 2015, but it helped popularize many concepts like decentralized control and concurrent programming. The simulator helped drive innovation in robot simulation. MRDS influenced later frameworks with its proof of concepts.
5. Webots
Webots is a commercial robot simulator developed by Cyberbotics. It provides a complete physics engine for modeling sensors and environmental effects. Webots lets you accurately prototype robots in a virtual environment before hardware testing. It comes with numerous robot models across many types like autonomous cars, drones, and humanoids. Webots provides C++, Python, and Java APIs. It also interfaces with MATLAB for analysis. Many research institutions and companies use Webots for robotics R&D. It strikes a good balance between advanced modeling and usability.
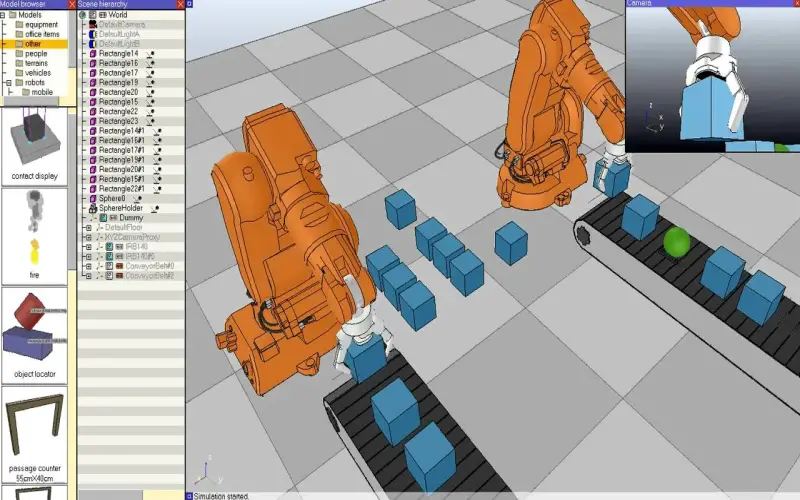
6. CoppeliaSim
COPPELIASIM is an advanced 3D robot simulator focused on model flexibility. It provides an integrated development environment for designing robots, sensors, and scenarios. COPPELIASIM includes four physics engines to choose from depending on need. It has an extensive API in C/C++, Python, Java, Lua, Matlab, and open-source plugins. COPPELIASIM has an active user community for help and collaboration. The open-source COPPELIASIM is good for prototyping, while the professional version has added licensing, UI, and support capabilities. COPPELIASIM enables the development of complex robots and integrations.
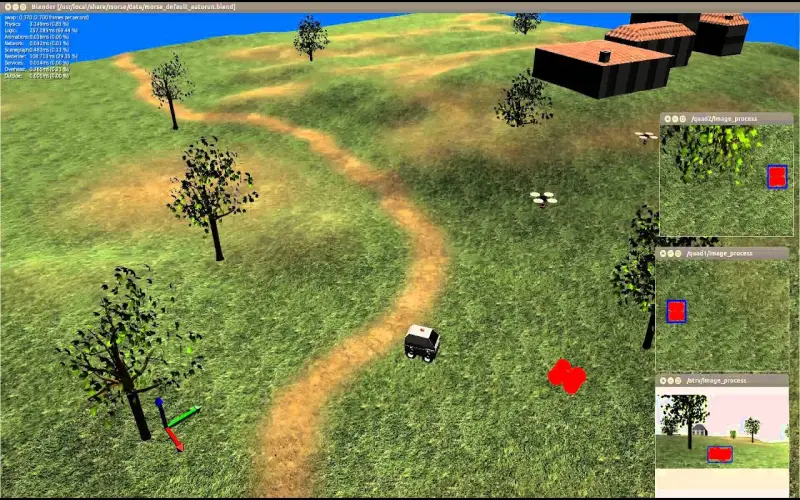
7. Morse
Morse is an open-source robotics simulator platform. It uses lightweight components to model sensors, actuators, and environments. Sensors and actuators are programmed using Python. Components are configured using XML descriptors. Morse provides APIs in C++, Java, and Python. It is designed for rapid prototyping and research in robotics. By simplifying simulation into reusable components, Morse enables testing algorithms and designs quickly before real implementation. It is not as feature-rich as some simulators but useful for basic research needs.
8. Player Project
Player Project was an early open-source robot interface and server. It provided hardware abstraction for devices like sensors and motors across robot platforms. Player Project could integrate with simulator back-ends for testing. It had a clean API in C++ with bindings for languages like Python, Java, and Matlab. Development started in 1999, with its heyday in the early 2000s. While no longer officially maintained, Player Project pioneered concepts in robotics middleware and device servers. It influenced later frameworks with its socket-based client-server architecture.
9. CARMEN
CARMEN (Carnegie Mellon Robot Navigation Toolkit) is an open-source robot control, navigation, and mapping software written in C++. It provides algorithms like Bayesian localization, mapping, and path planning optimized for robotics. Although development was discontinued around 2010, CARMEN was influential in robotics research for many years. It demonstrated real-time sensor fusion and control capabilities on robot platforms in the early 2000s. The modular architecture inspired other frameworks to adopt the separation of localization, control, and planning.
10. Orca
Orca is an open-source framework for developing component-based robots. It models hardware devices like sensors and motors as reusable components that communicate over IPC. Orca provides APIs in both C++ and Python. It was developed by Carnegie Mellon for controlling robots in Antarctica such as the ADELE penguin robot. Orca uses XML to configure components at runtime. While designed for research, Orca demonstrates principles of reusable robotic components that abstract low-level hardware details.
















{kind=link}